| STH060S-600EH |
| |
J1 axis |
J2 axis |
J3 axis |
R axis |
| Shaft gauge |
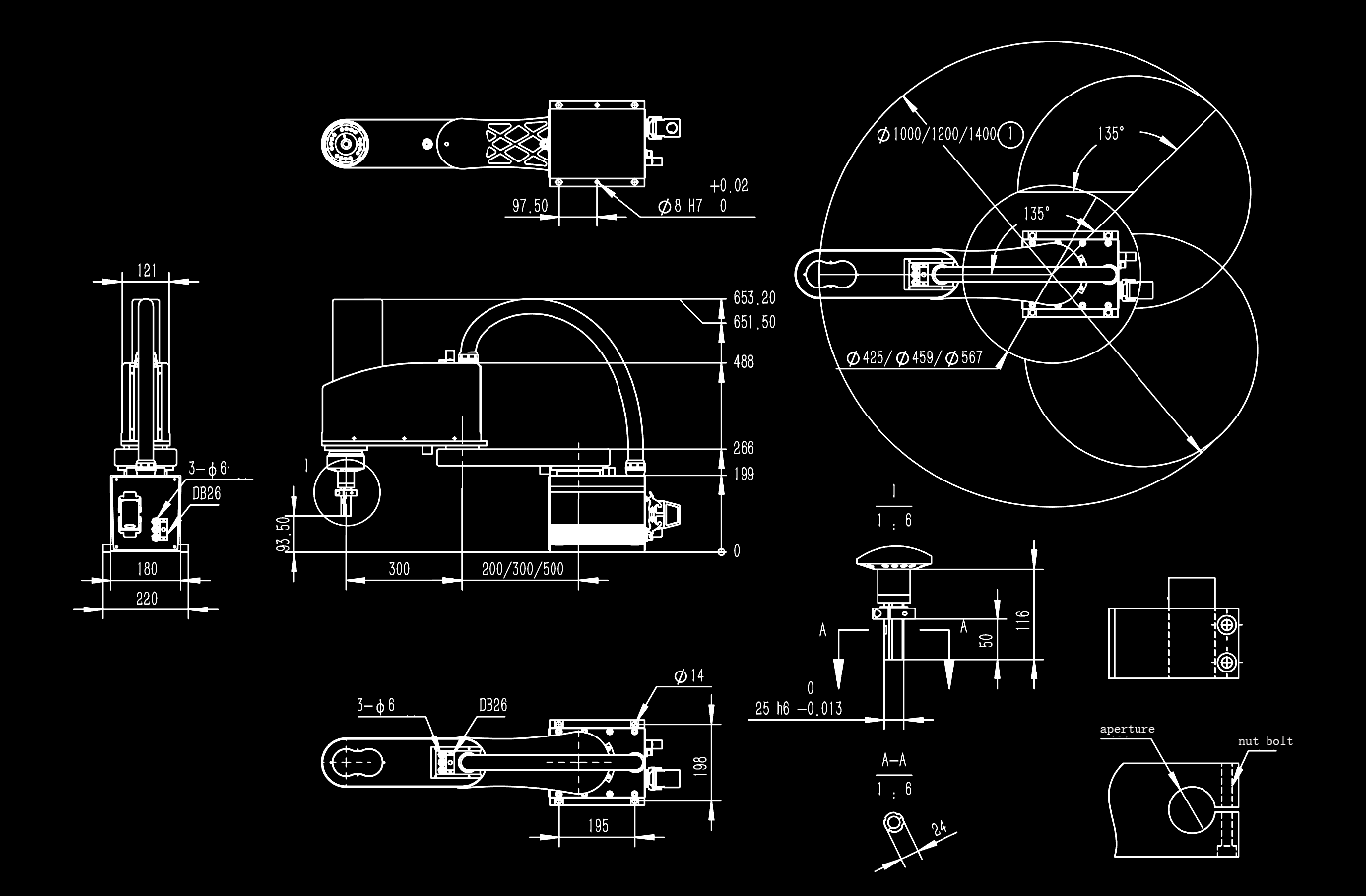
Arm length (mm) |
300 |
300 |
200 |
- |
| Rotation range (degrees) |
135 |
135 |
- |
360 |
| -135 |
-135 |
-360 |
| Motor name |
Italy RRRobotica |
| Motor output |
750W(AC) |
400W(AC) |
400W(AC) |
200W(AC) |
| Slow down mechanism |
Reducer |
Harmonic gear drive |
Harmonic gear drive |
- |
Harmonic gear drive |
| Conduction |
Motor and reducer |
Direct |
- |
Synchronous pulley connection |
| Reducer and output |
Direct |
| Repeated positioning accuracy (X, Y, Z: mm) (r: degrees) |
±0.02 |
|
±0.02 |
±0.02 |
| Top speed(x,y,z:mm/sec)(r:degree/sec) |
288 |
460 |
640 |
452 |
| Maximum handling weight(kg) |
6KG |
| Standard cycle time: 1KG can be transported(sec) |
0.5seconds |
| R axis allows moment of inertia (KGm2) |
0.11 |
| Input (IN) Output (OUT) |
0.2*10 |
| User piping (outside) |
Φ6*3 |
| Robot cable length (m) |
Standard: 3 Optional: 5 |
| Host weight (KG) |
37.5~42KG |